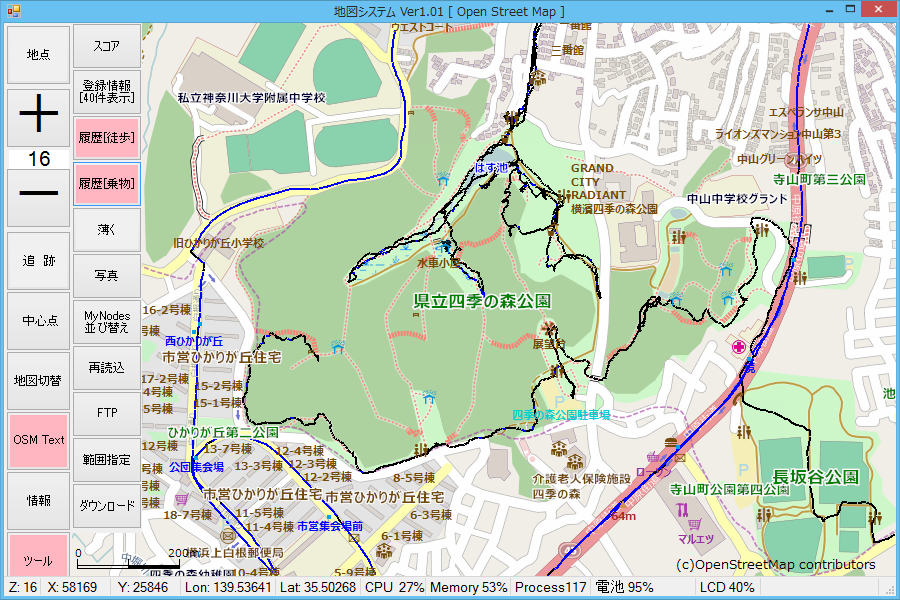
下図に自作地図システムの画面を示す。 この地図はOSM(Open Street Map)[1]のデータを使って作成したものである。
フリーソフトMapnik[2]によって全ての文字情報を含めたタイル画像地図を作成することができるが、 自作システムでは道路名、川名を除いた文字情報は、Mapnikで描画せず、地図表示時に、プログラムで 上書き描画している。
道路上の青線はバスで移動した軌跡、黒線は徒歩の軌跡である。 これも、Mapnikの地図に上書きしたものであり、ボタン操作で描画をオン・オフできる。 GPSで位置情報をロギングしており、移動速度から徒歩か乗物(バス・電車・車)かどうかを判定している。
Mapnik本体は C++ で描画されているが、OSM地図は Pythonプログラムで描画をコントロールしている。 OSM地図データは XML で記述されている。Mapnikもまた描画ルールを XML で記述している。 描画ルールは5000行に及ぶ。アイコンおよび道路・川名以外の文字情報は Mapnikでは描画しないため、 カスタマイズした描画ルールは元の描画ルールよりかなり小さくなっている。
OSMデータは PostgreSQL データベースにインポートされる。 Mapnikはこのデータベースからデータを取り込んで描画ルールに従って、タイル地図画像を生成する。
プログラムは Python で記述されている。 現在使用しているプログラムを下に示す。 これは、ひな形を少し修正したものである。
#!/usr/bin/env python
from math import pi,cos,sin,log,exp,atan
from subprocess import call
import sys, os
from Queue import Queue
import threading
try:
import mapnik2 as mapnik
except:
import mapnik
DEG_TO_RAD = pi/180
RAD_TO_DEG = 180/pi
# Default number of rendering threads to spawn, should be roughly equal to number of CPU cores available
NUM_THREADS = 4
def minmax (a,b,c):
a = max(a,b)
a = min(a,c)
return a
class GoogleProjection:
def __init__(self,levels=18):
self.Bc = []
self.Cc = []
self.zc = []
self.Ac = []
c = 256
for d in range(0,levels):
e = c/2;
self.Bc.append(c/360.0)
self.Cc.append(c/(2 * pi))
self.zc.append((e,e))
self.Ac.append(c)
c *= 2
def fromLLtoPixel(self,ll,zoom):
d = self.zc[zoom]
e = round(d[0] + ll[0] * self.Bc[zoom])
f = minmax(sin(DEG_TO_RAD * ll[1]),-0.9999,0.9999)
g = round(d[1] + 0.5*log((1+f)/(1-f))*-self.Cc[zoom])
return (e,g)
def fromPixelToLL(self,px,zoom):
e = self.zc[zoom]
f = (px[0] - e[0])/self.Bc[zoom]
g = (px[1] - e[1])/-self.Cc[zoom]
h = RAD_TO_DEG * ( 2 * atan(exp(g)) - 0.5 * pi)
return (f,h)
class RenderThread:
def __init__(self, tile_dir, mapfile, q, printLock, maxZoom):
self.tile_dir = tile_dir
self.q = q
self.m = mapnik.Map(256, 256)
self.printLock = printLock
# Load style XML
mapnik.load_map(self.m, mapfile, True)
# Obtain <Map> projection
self.prj = mapnik.Projection(self.m.srs)
# Projects between tile pixel co-ordinates and LatLong (EPSG:4326)
self.tileproj = GoogleProjection(maxZoom+1)
def render_tile(self, tile_uri, x, y, z):
# Calculate pixel positions of bottom-left & top-right
p0 = (x * 256, (y + 1) * 256)
p1 = ((x + 1) * 256, y * 256)
# Convert to LatLong (EPSG:4326)
l0 = self.tileproj.fromPixelToLL(p0, z);
l1 = self.tileproj.fromPixelToLL(p1, z);
# Convert to map projection (e.g. mercator co-ords EPSG:900913)
c0 = self.prj.forward(mapnik.Coord(l0[0],l0[1]))
c1 = self.prj.forward(mapnik.Coord(l1[0],l1[1]))
# Bounding box for the tile
if hasattr(mapnik,'mapnik_version') and mapnik.mapnik_version() >= 800:
bbox = mapnik.Box2d(c0.x,c0.y, c1.x,c1.y)
else:
bbox = mapnik.Envelope(c0.x,c0.y, c1.x,c1.y)
render_size = 256
self.m.resize(render_size, render_size)
self.m.zoom_to_box(bbox)
if(self.m.buffer_size < 128):
self.m.buffer_size = 128
# Render image with default Agg renderer
im = mapnik.Image(render_size, render_size)
mapnik.render(self.m, im)
im.save(tile_uri, 'png256')
def loop(self):
while True:
#Fetch a tile from the queue and render it
r = self.q.get()
if (r == None):
self.q.task_done()
break
else:
(name, tile_uri, x, y, z) = r
exists= ""
if os.path.isfile(tile_uri):
exists= "exists"
else:
self.render_tile(tile_uri, x, y, z)
bytes=os.stat(tile_uri)[6]
empty= ''
if bytes == 103:
empty = " Empty Tile "
self.printLock.acquire()
print name, ":", z, x, y, exists, empty
self.printLock.release()
self.q.task_done()
def render_tiles(bbox, mapfile, tile_dir, minZoom=1,maxZoom=18, name="unknown", num_threads=NUM_THREADS, tms_scheme=False):
print "render_tiles(",bbox, mapfile, tile_dir, minZoom,maxZoom, name,")"
# Launch rendering threads
queue = Queue(32)
printLock = threading.Lock()
renderers = {}
for i in range(num_threads):
renderer = RenderThread(tile_dir, mapfile, queue, printLock, maxZoom)
render_thread = threading.Thread(target=renderer.loop)
render_thread.start()
#print "Started render thread %s" % render_thread.getName()
renderers[i] = render_thread
if not os.path.isdir(tile_dir):
os.mkdir(tile_dir)
gprj = GoogleProjection(maxZoom+1)
ll0 = (bbox[0],bbox[3])
ll1 = (bbox[2],bbox[1])
for z in range(minZoom,maxZoom + 1):
px0 = gprj.fromLLtoPixel(ll0,z)
px1 = gprj.fromLLtoPixel(ll1,z)
# check if we have directories in place
zoom = "%s" % z
if not os.path.isdir(tile_dir + zoom):
os.mkdir(tile_dir + zoom)
for x in range(int(px0[0]/256.0),int(px1[0]/256.0)+1):
# Validate x co-ordinate
if (x < 0) or (x >= 2**z):
continue
# check if we have directories in place
str_x = "%s" % x
if not os.path.isdir(tile_dir + zoom + '/' + str_x):
os.mkdir(tile_dir + zoom + '/' + str_x)
for y in range(int(px0[1]/256.0),int(px1[1]/256.0)+1):
# Validate x co-ordinate
if (y < 0) or (y >= 2**z):
continue
# flip y to match OSGEO TMS spec
if tms_scheme:
str_y = "%s" % ((2**z-1) - y)
else:
str_y = "%s" % y
tile_uri = tile_dir + zoom + '/' + str_x + '/' + str_y + '.png'
# Submit tile to be rendered into the queue
t = (name, tile_uri, x, y, z)
try:
queue.put(t)
except KeyboardInterrupt:
raise SystemExit("Ctrl-c detected, exiting...")
# Signal render threads to exit by sending empty request to queue
for i in range(num_threads):
queue.put(None)
# wait for pending rendering jobs to complete
queue.join()
for i in range(num_threads):
renderers[i].join()
if __name__ == "__main__":
home = "c:/mapnik-stylesheets-master"
mapfile = home + "/my_osm.xml"
tile_dir = "c:/gisdata/tiles_tmp/osm/"